Optimizing the above objective directly is challenging since the cost function has non-differentiable components. We approximate this objective and introduce cost-awareness with two different strategies.
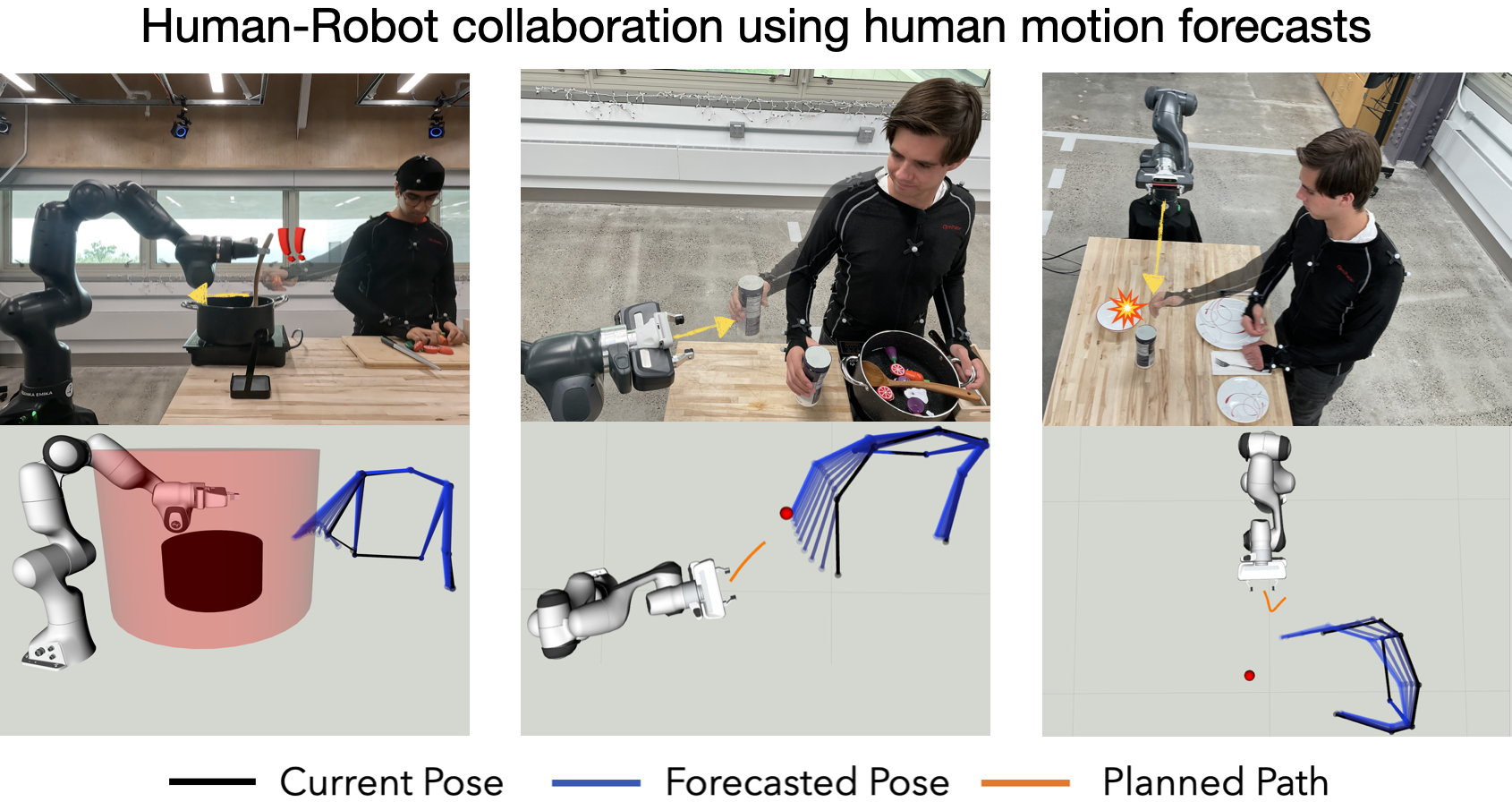
Seamless human-robot manipulation in close proximity relies on accurate forecasts of human motion. While there has been significant progress in learning forecast models at scale, when applied to manipulation tasks, these models accrue high errors at critical transition points leading to degradation in downstream planning performance. Our key insight is that instead of predicting the most likely human motion, it is sufficient to produce forecasts that capture how future human motion would affect the cost of a robot's plan. We present ManiCast, a novel framework that learns cost-aware human forecasts and feeds them to a model predictive control planner to execute collaborative manipulation tasks. Our framework enables fluid, real-time interactions between a human and a 7-DoF robot arm across a number of real-world tasks such as reactive stirring, object handovers, and collaborative table setting. We evaluate both the motion forecasts and the end-to-end forecaster-planner system against a range of learned and heuristic baselines while additionally contributing new datasets.
We release a high-quality dataset collected using a motion capture system, consisting of two humans collaborating to perform daily household activities.


Optimizing the above objective directly is challenging since the cost function has non-differentiable components. We approximate this objective and introduce cost-awareness with two different strategies.
Identify "transitions" when the human comes into the robot's workspace and upsampling these regions in our dataset.
The planning cost is sensitive to forecasting errors along certain dimensions of the human pose, so we upweight them.
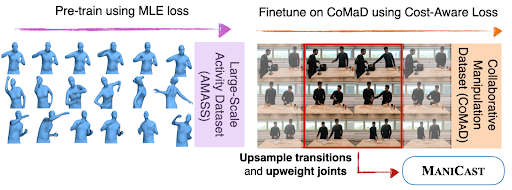
Overview of our framework ManiCast, which learns cost-aware human motion forecasts and plans with such forecasts for collaborative manipulation tasks. At train time, we fine-tune pre-trained human motion forecasting models on task specific datasets by upsampling transition points and upweighting joint dimensions that dominate the cost of the robot's planned trajectory. At inference time, we feed these forecasts into a model predictive control (MPC) planner to compute robot plans that are reactive and keep a safe distance from the human.
